Temperatuuri andur, Servo mootor
4.1 Katse Temperatuuri andur
Ühendamise skeem:
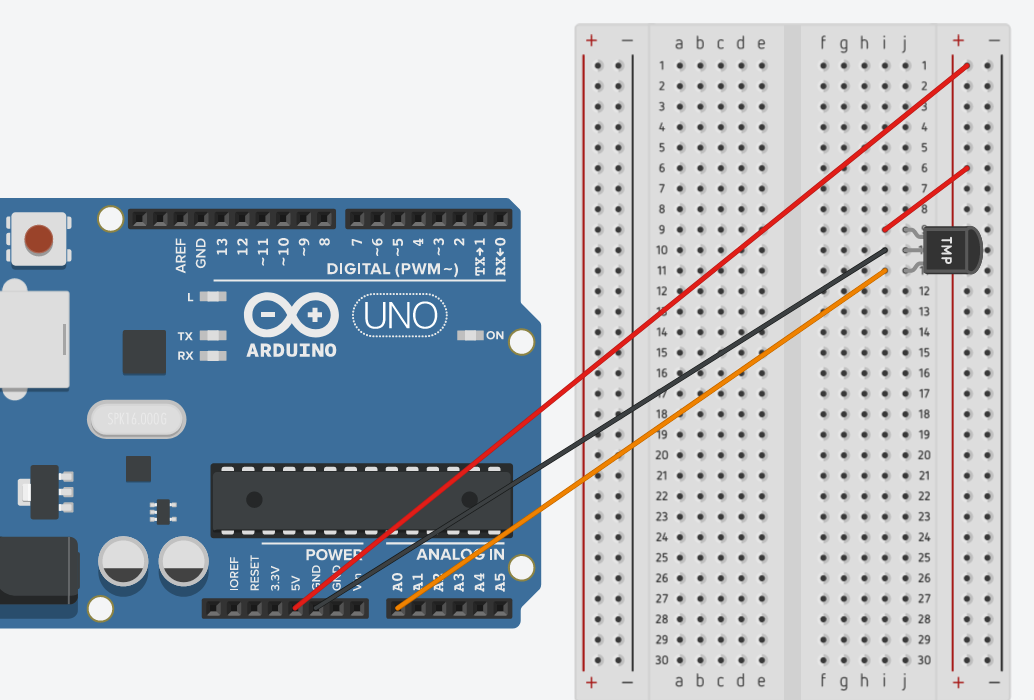
andur tuvastab temperatuuri tõusud ja langused
Komponeendid:
—————————————Kood—————————————
const int temperaturePin = 0;
void setup()
{
Serial.begin(9600);
}
void loop()
{
float voltage, degreesC, degreesF;
// kasutame analogRead(), mis tagastab sisendi väärtused vahemikul 0 … 1023.
// koostasime getVoltage() funktsioon, mis tagastab pingeväärtus 0 … 5,
voltage = getVoltage(temperaturePin);
degreesC = (voltage – 0.5) * 100.0;
// degreesC = voltage * 100.0;
degreesF = degreesC * (9.0/5.0) + 32.0;
Serial.print(“voltage: “);
Serial.print(voltage);
Serial.print(” deg C: “);
Serial.print(degreesC);
Serial.print(” deg F: “);
Serial.println(degreesF);
//Ekraanil ilmub järgmine tekst: “voltage: 0.73 deg C: 22.75 deg F: 72.96”
delay(1000); // ootame 1 sek
}
float getVoltage(int pin)
{
return (analogRead(pin) * 0.004882814);
// teisendame pinge vahemikust 0,0 … 5,0 V, vahemikku 0 до 1023.
}
—————————————————————————————
4.2. Katse Servo kasutamine
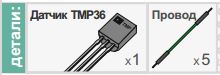
Ühendamise skeem:
Mootor hakkab liikuma, kui saab energiat
Komponeendid:

—————————————Kood—————————————
Servo servo1; // Peame looma servo objekti nimega servo1 (объект управления сервоприводом)
void setup()
{
// Сейчас мы прикрепим (attach) объект servo1 к цифровому пину 9. Если вы собираетесь управлять более чем одним
// сервоприводом, Вы должны прикрепить каждый новый объект серво к своему, отдельному порту, причем это порт должен быть цифровым.
servo1.attach(9); //ütleme Arduinole, et infosuhtlus servo-objektiga servo käib läbi klemmi number 9. Tegu on digitaal-klemmiga–PWM digitaalne osa! Kontrollime, kas skeemil kasutame sama klemmi.
}
void loop()
{
int position;
servo1.write(90); //pööramise nurk =90
delay(1000);
servo1.write(180); //pööramise nurk =180
delay(1000);
servo1.write(0); //pööramise nurk =0
delay(1000);
// servo positsiooni muutmine väike kiirusega pärisuunas:
for(position = 0; position < 180; position += 2)
{
servo1.write(position); // positsiooni muutmine
delay(20);
}
// servo positsiooni muutmine väike kiirusega vastupäeva:
for(position = 180; position >= 0; position -= 1)
{
servo1.write(position); // positsiooni muutmine
delay(20);
}
}
—————————————————————————————
4 Temperatuuritundlik servolülitus(Kasvuhoone temperatuuri reguleegimine)
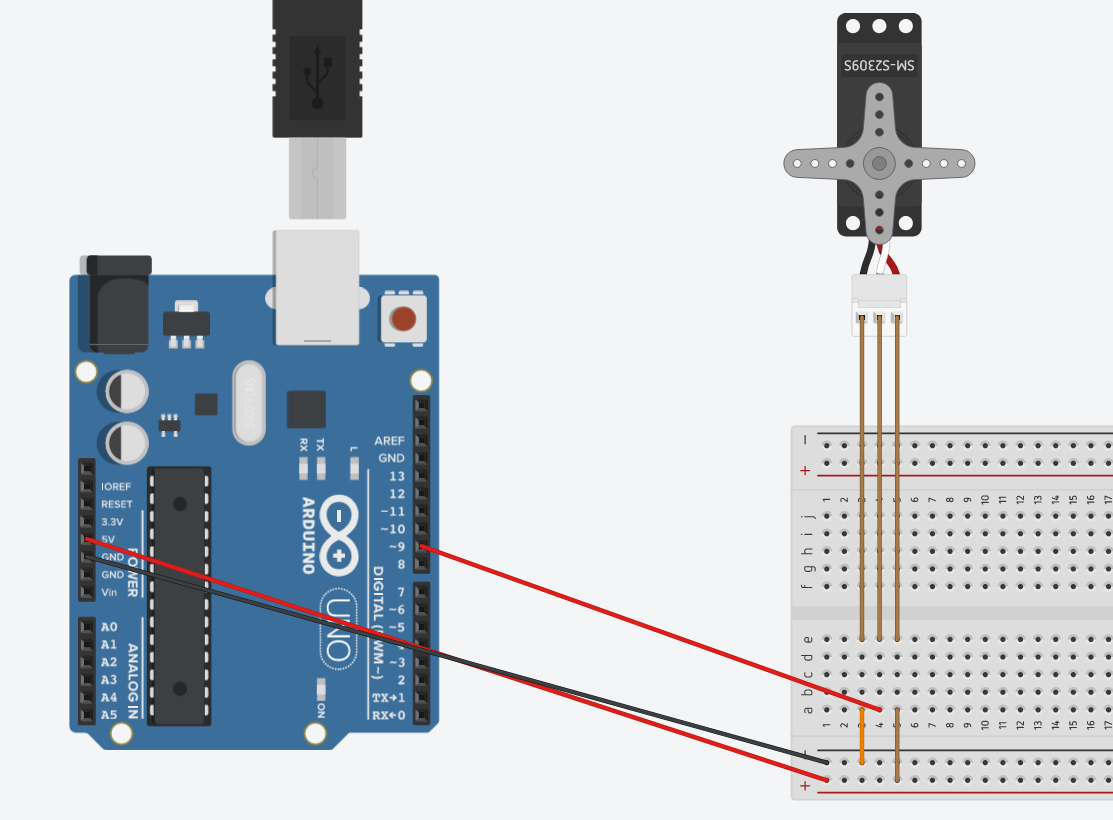
Ühendamise skeem:
Komponeendid:
| Name | Quantity | Component |
|---|---|---|
| U1 | 1 | Arduino Uno R3 |
| SERVO1 | 1 | Micro Servo |
| U2 | 1 | Temperature Sensor [TMP36] |
| R1 | 1 | Photoresistor |
| R2 R3 | 2 | 220 Ω Resistor |
| D1 | 1 | Red LED |
—————————————Kood—————————————
#include <Servo.h>
Servo servo1;
const int temperaturePin = 0;
const int redledPin = 13;
float voltage, degreesC, lightVal;
const int lightPin = 1;
int lightLevel, high = 0, low = 1023;
float getVoltage(int pin) {
return (analogRead(pin) * 0.004882814);
}
int autoTune(int lightLevel) {
if (lightLevel < low) {
low = lightLevel;
}
if (lightLevel > high) {
high = lightLevel;
}
lightLevel = map(lightLevel, low+10, high-30, 0, 255);
lightLevel = constrain(lightLevel, 0, 255);
return lightLevel;
}
void setup() {
servo1.attach(11);
pinMode(temperaturePin, INPUT);
pinMode(redledPin, OUTPUT);
pinMode(lightPin, INPUT);
Serial.begin(9600);
}
void loop() {
voltage = getVoltage(temperaturePin);
degreesC = (voltage - 0.5) * 100.0;
if (degreesC <= 24) {
servo1.write(0);
} else if (degreesC > 24) {
servo1.write(180);
}
lightLevel = autoTune(analogRead(lightPin));
analogWrite(redledPin, lightLevel);
Serial.println(degreesC);
delay(500);
}Video:
Rakendus Valguskett:
Arvan, et see sobib ideaalselt taimedele või näiteks taimedele: kui on pime ja külm, läheb taimega kast kinni ja tuli süttib ning hommikul, kui läheb soojemaks, läheb kast lahti ja valgus kustub. välja.
Töö protsess:
Mootor hakkab tööle, kui temperatuuriandur soojeneb ja jahtub,
Tuli süttib, kui tuli kustub, ja kustub, kui tuli uuesti süttib.